

[From the last episode: We looked at how to build a simple accelerometer.]
Before we talk more about accelerometersA sensor that measures acceleration and deceleration. and other so-called inertial measurement unitsA combination sensor with an accelerometer and a gyroscope, and, often, with a magnetometer. The first two rely on inertia to tell you where you are and where you’re going., we need to hit on one important generic concept: the notion of “degrees of freedomA setting or property that can be adjusted independently without affecting any other setting. With movement, there are three straight-line degrees of freedom: forward/backward, up/down, and left/right..” If this is a familiar concept to you, you probably don’t need to read this.
Generally speaking, we have control over many things. That control may allow us to adjust different properties of a thing. For example, in your car, you can control the speed and you can control the heater fan. When we talk about speed, however, you can control your engine speed and your wheel speed.
Are They Related?
Let’s start with that last one. You might say – especially if you have an automatic transmission – that changing the engine speed is the same as changing the wheel speed – you can’t do one without the other. Now… there’s some wiggle room there: if you have a manual transmission (or if you use manual mode on your automatic), then you can change gears to change the engine speed without changing the wheel speed. But, after changing gears, you’re back to the same issue: you can’t change one without the other.
That’s because wheel speed and engine speed are correlated – they’re not independent of each other.
By contrast, engine speed (or wheel speed) and the speed of your heater fan have nothing to do with each other (assuming the engine is running… if you want to be purist about it, let’s make this about wheel speed and fan speed). You can go fast or slow; you can run the fan fast or slow. One does not depend on the other.
Because these things are independent of each other (an engineer might say that they’re orthogonalAt right angles (or 90°) to something else. More generally, two settings or properties that you can set independently of each other are said to be orthogonal. to each other – for reasons that will become clear in a minute), you are free to adjust one without regard to the other. Each is a degree of freedom. If the only things you could control in a car were the engine (and wheel) speed and the fan speed, then you’d say that you have two degrees of freedom in the car. If you lurk in arcane engineering places, you might see “degrees of freedom” abbreviated as DoF. You can also think of these as dimensions, which makes more sense when we talk about movement.
3D Acceleration
So what does that have to do with accelerometers?
An accelerometer tells you whether you’re accelerating in a straight line. But… in what direction? You could be accelerating forward or backward; you could be accelerating left or right; and you could be accelerating up or down.
But what if you’re accelerating in a diagonal direction – say, forward and to the right? Well, your clue is right there. You’re moving both in the forward and rightward directions at the same time. If you were on a boat that was rising with the waves while you did that, you’d be moving in the forward, rightward, and upward directions at the same time.
In other words, any movement you make can be broken down into those three categories. But if you move only forward, for instance, it doesn’t affect your left/right or up/down position. That is to say, these three directions are independent of each other – they are three degrees of freedom. (You’ll also notice that they’re at right angles – or orthogonal – to each other; that’s why we refer to completely independent settings as being orthogonal.)
So, with movement, we have three degrees of freedom; it’s 3D. But our accelerometer only handles one; it’s 1D.
Round and Round
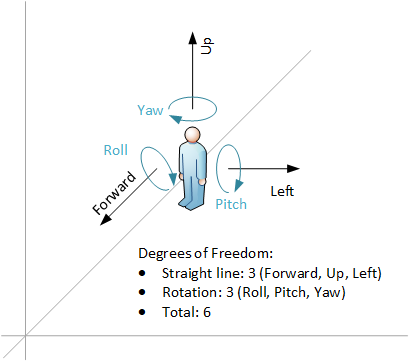
But there’s yet other movement we can do: instead of moving in one of those directions, we can just spin in place – say, face a different direction. In fact, there are three ways you can rotate, and, in an airplane, they’re referred to as:
- Roll: rotating around a horizontal forward line. In an airplane, that’s when the wings dip back and forth; with you, your head would go, say, to the left, while your feet went to the right.
- Pitch: rotating around a horizontal left/right line. In an airplane, this could be the nose dipping down while the tail went up, or vice versa. For you, it would mean, say, your head moving down forward while your feet move up in the back.
- Yaw: rotating around a vertical line. This seems weird for a plane – it’s like it’s rotating like a top. But for us, it’s our most natural kind of rotation – rotating on your feet so you’re facing a different direction.
Each of these rotations is independent of the other, and they’re independent of any motion in a line. So now we have a total of 6 DoF. Three of them can be measured by accelerometers; the other three by a gyroscopeA sensor that detects when it changes direction..
Next we’ll see what we need to do to make our accelerometers measure all 3 DoF.

Leave a Reply